|
|


31 sierpień 2011
 |

|

|

|





|
|
Firma Fanuc Robotics, producent robotów przemysłowych, dążąc do zwiększenia funkcjonalności oferowanych urządzeń opracowała nową technologię umożliwiającą sterowania ruchem robotów. Jest nią funkcja Softfloat która jest opcją oprogramowania Fanuc, przeznaczoną do korygowania trajektorii ruchu robota, pod wpływem sił działających na niego z zewnątrz. Ogromną zaletą jest fakt, że jest to opcja w pełni programowa, która nie wymaga instalacji dodatkowych części mechanicznych, czy sensorów.
Najczęstszym wykonywanym przez robota ruchem jest przemieszczenie przedmiotu z określonego punktu A do punktu B. W przypadku, gdy robot jest używany np. do umieszczania w obrabiarce elementu, który nie jest dokładnie obrobiony może się okazać, że niedokładności produktu spowodują przesunięcie detalu względem narzędzia. Przydatna w takiej sytuacji jest opisywana w artykule funkcja.
Mając do dyspozycji SoftFloat programista jest w stanie określić sytuacje, w których robot będzie miał możliwość poddania się zewnętrznej sile i przesunięcia do innej pozycji.
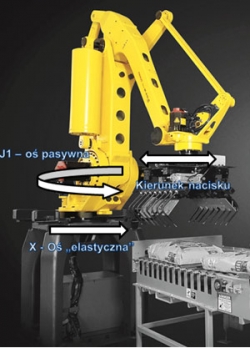
Funkcja posiada dwie odmiany: Softfloat (J612) oraz High Performance Softfloat (J898). Pierwsza z nich posiada dwa tryby działania. Joint Softfloat polega na wskazaniu, która oś robota staje się w określonych warunkach „elastyczna” oraz w jakim kierunku ma poddać się zewnętrznej sile. Natomiast w trybie Cartesian softfloat określa się oś w układzie kartezjańskim, która ma się „poddać” sile zewnętrznej oraz kierunek działania. W tym trybie robot, w zadanym kierunku, zachowuje się jak sprężyna w tym znaczeniu, że pod wpływem siły zewnętrznej ramię robota zostanie przesunięte, a po odjęciu siły wraca do swojej pierwotnej pozycji. Istnieje również instrukcja Follow Up (podążaj), która pozwala pozostać robotowi w nowej pozycji.
Funkcja High Performance Softfloat daje programiście dodatkowy tryb pracy Pushout. Jego działanie jest podobne do opisywanego tybu Cartesian z tą różnicą, że robot działa z mniejszą siłą i momentem na detal. Dzięki temu funkcja jest bardzo użyteczna podczas odbierania detali z wtryskarki.
Dla każdej osi może zostać określona inna siła graniczna, przy której robot poddaje się zewnętrznej sile oraz inny opór na siłę zadawaną z zewnątrz. Jeżeli robot jest obciążony i włączona jest funkcja SoftFloat, robot utrzymuje pozycję równie stabilnie, jak w przypadku gdy funkcja jest wyłączona.
Zastosowanie:
Cechy produktu:
Używając opisywanej funkcji można w łatwy sposób uniknąć instalowania dodatkowych czujników położenia oraz zapobiec uszkodzeniu delikatnych części. Opisywana opcja programowa jest dostępna dla oprogramowania od V7.20P/25 (R-30iA), V6.30P/96(R-J3iB).

| REKLAMA |
|
|

| REKLAMA |
|
|
| REKLAMA |
|
|











