|
|


30 listopad 2012
 |

|

|

|





|
|
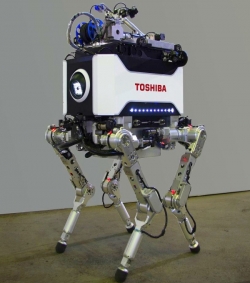
Roboty na terenie elektrowni atomowej Fukushima odegrały kluczową rolę w ocenie szkód i poziomu promieniowania obiektu sparaliżowanego przez silne trzęsienie ziemi i tsunami, które nawiedziło Japonię w 2011 roku. Jednak do tej pory wszystkie roboty penetrujące reaktory poruszały się na gąsienicach, ewentualnie obserwowały okolicę z góry. Toshiba postanowiła to zmienić i ogłosiła, że planuje wysłać na miejsce katastrofy czworonożnego robota.
Liczne stawy tetrapoda kontrolowane są przez dedykowany algorytm, który umożliwia poruszanie się robota chodzić na nierównej powierzchni, unikanie przeszkód i wspinaczkę po schodach. Umożliwiłoby to zabezpieczenie dostępu do obszarów, które są trudne do osiągnięcia przez roboty kołowe i poruszające się na gąsienicach.
Zdalnie sterowany, odporny na promieniowanie czworonóg ma zainstalowanych wiele kamer oraz dozymetr. Jego nogi są napędzane przez silniki elektryczne (w przeciwieństwie do BigDoga i HyQ, które wykorzystują układ hydrauliczny). Tetrapod Toshiby ma też "składane ramię, z którego można uwolnić mniejszego robota" wyposażonego w kamerę, który mógłby spenetrować niedostępne dla czworonoga zakamarki.
Specyfikacja techniczna czworonożnego robota Toshiby:
Źródło: Toshiba, spectrum.ieee.org

| REKLAMA |
|
|

| REKLAMA |
|
|
| REKLAMA |
|
|











