|
|
 |

|

|

|
Energetyka, Automatyka przemysłowa, Elektrotechnika





|
|
|
|
|
|
|
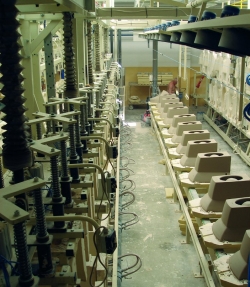
Firma Cersanit będąca największym producentem wyrobów ceramiki sanitarnej w kraju postanowiła zautomatyzować dotychczasowy proces produkcji. Produkcja misek klejonych w ich zakładzie produkcyjnym odbywała się do niedawna ręcznie, co powodowało duże straty i odpady, zwłaszcza w czasie procesu klejenia. Firma Cersanit przedstawiła własną koncepcję produkcji, a na jej podstawie firma Bosch Rexroth podjęła się opracowania układu automatyzacji linii produkcyjnych misek klejonych. Projekt zrealizowany został przez firmę Bosch Rexroth Sp. z o. o. przy współpracy z firmą Remzel, wykonawcą części mechanicznej, elektrycznej i montażu.
Linie produkcyjne zakładu w Krasnym Stawie podzielone są na dwie części:
Odlew wewnętrzny po wyjęciu z formy trafia na ławę zewnętrzną, która pełni dwie funkcje:
Do napędu linii produkcyjnych użyto mechanizmu śrubowego z przekładnią ślimakową i silnikiem 3 kW, 1500 obr/min.
Do dokładnego zacisku użyto siłowników pneumatycznych o średnicy 80 mm i skoku 100 mm, które sterowane są za pomocą wysp zaworowych HF04… Ze względu na wymogi technologii produkcji konieczne było zastosowanie w wyspach HF04… dwóch obiegów ciśnienia:
Manipulator wyjmujący wyroby z formy sterowany jest ręcznie za pomocą zaworów 5/2 i dodatkowo wyposażony jest w dwuręczne zawory bezpieczeństwa. Główny siłownik pneumatyczny zainstalowany w manipulatorze to siłownik PRA-DN125 o skoku 550 mm. Maszyna wyposażona jest również w siłowniki pomocnicze - zaciskowe DN 40x40. Prowadzenie stołu zapewniają wałki o średnicy ϕ = 40 mm z łożyskami liniowymi.
Manipulator wyjmujący odlew (wewnętrzny) z formy:
W ciągu transportowym ze względów technologicznych konieczny był obrót wyrobu o 180°. W tym celu zaprojektowano i wykonano manipulator obrotowy wyrobów.
Obrót realizowany jest za pomocą silnika z przekładnią ślimakową, natomiast zacisk z zadaną siłą realizowany jest przy pomocy siłowników pneumatycznych sterowanych wyspą zaworową.
Wyspa zaworowa HF04:
Równoległość stołów podczas ścisku zapewniają prowadnice.
Do rozładunku wyrobów z ciągu transportowego na wózki magazynowe służą dwa balansery.
Całość inwestycji, tj. od zatwierdzenia projektu do uruchomienia produkcji, zrealizowano w siedem miesięcy. Obecnie realizowany jest następny etap, który zakończony zostanie we wrześniu br.
Obrotnica:
1. Korpus 2. Prowadnica podajnika 3. Siłownik podajnika | 4. Podajnik górny 5. Podajnik dolny 6. Płyta zderzaka | 7. Napęd podajnika górnego 8. Napęd podajnika dolnego 9. Napęd korpusu | 10. Podstawa 11. Szafka sterownicza |

| REKLAMA |
|
|

| REKLAMA |
|
|






 z formy")













